Robotics / 2025
Robotics Class Mobile Manipulator
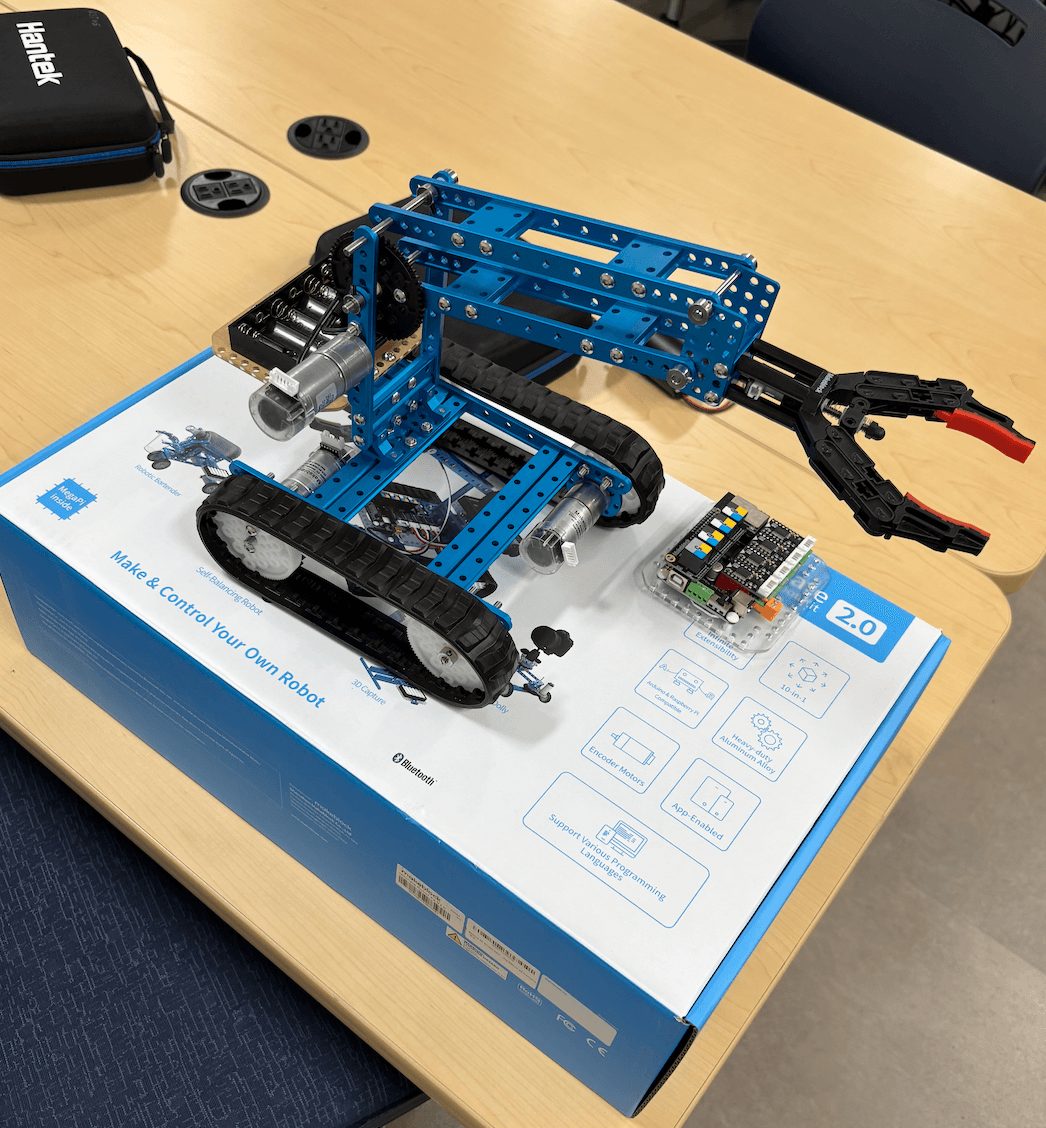
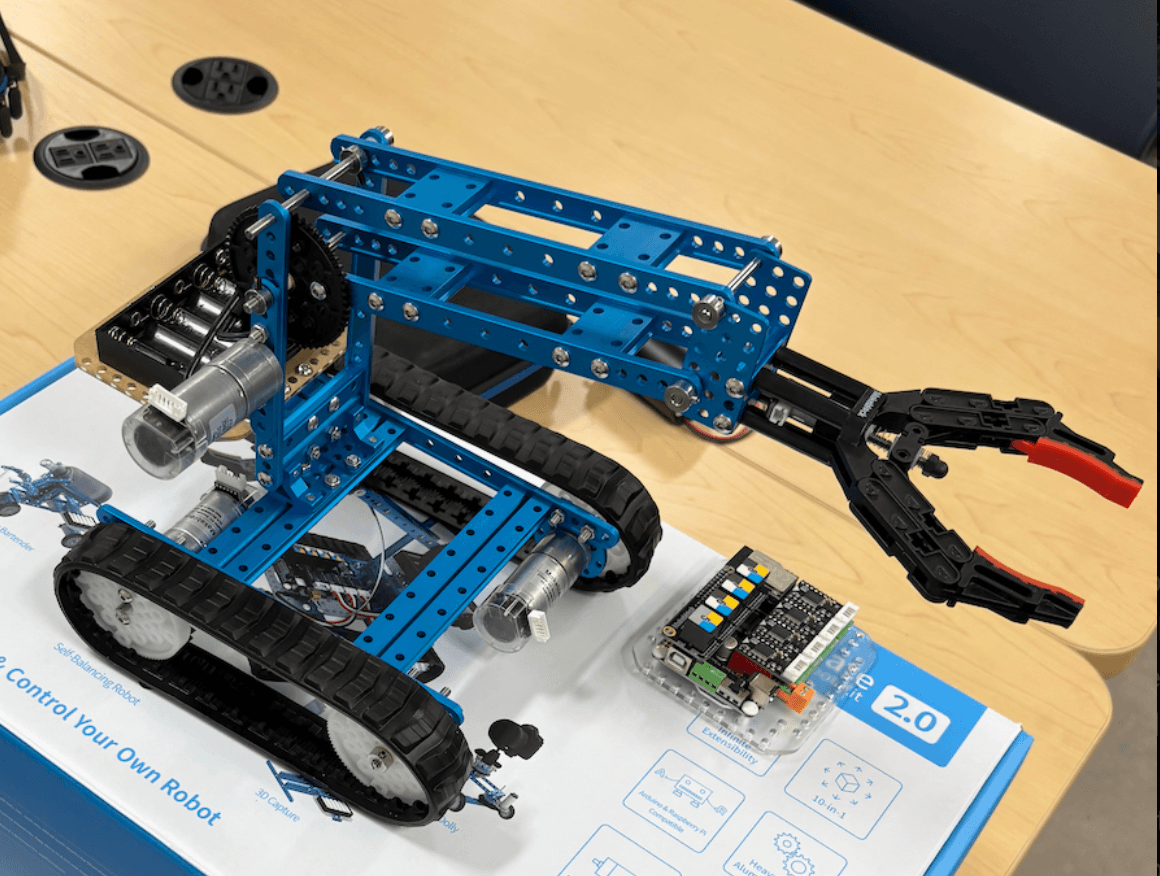
Built a tracked classroom robot with a powered drivetrain, arm structure, gripper, electronics, and control logic.
Tracked drivetrain, actuated arm, gripper hardware, controller wiring, and kinematics coursework.
- Role
- Mechanical build, integration, robotics coursework
- Status
- Built
- Tools
- ActuatorsForward/inverse kinematicsGripperTracked drivetrainEmbedded controlHands-on debugging
Problem
Build a working mobile manipulator that brought together drivetrain motion, gripper behavior, wiring, and repeatable actuation.
What I built
- Assembled the tracked base, frame members, motors, arm structure, and gripper into a working electromechanical system.
- Integrated controller hardware and wiring, then debugged motor behavior and actuation issues through hands-on test runs.
- Used forward and inverse kinematics concepts from coursework to reason about end-effector position and motion limits.
Engineering decisions
- Used a tracked drivetrain for stable traction and straightforward mechanical packaging.
- Focused first on alignment, wiring reliability, and repeatable motion before adding more complex behavior.
- Treated debugging as part of the build: motor response, structural alignment, and wiring were tested together.
Result
- Finished a working robotics build with drivetrain packaging, gripper integration, controls, and repeated hands-on debugging.
- The build gave me a physical way to apply the kinematics, actuation, and mechanism work from class.
Media