Robotics / Edge AI / 2026
Autonomous Pantry Robot
Developing a personal pantry-robot concept in Onshape, starting with an end effector for relocating cans, boxes, jars, and small containers before building the full arm/base architecture.
Personal Onshape end-effector study for shelf-scale relocation, safe item placement, and local edge-AI perception.
- Role
- Personal venture, end-effector CAD, system architecture
- Status
- In progress
- Tools
- OnshapeComputer visionJetson-class edge AIEnd effectorGripper assemblyShelf constraintsLocal inference
Problem
Design a compact personal robot concept for recognizing pantry items, relocating them within shelf spaces, and arranging heavier or more stable objects lower while keeping frequently used items easier to reach.
Current work
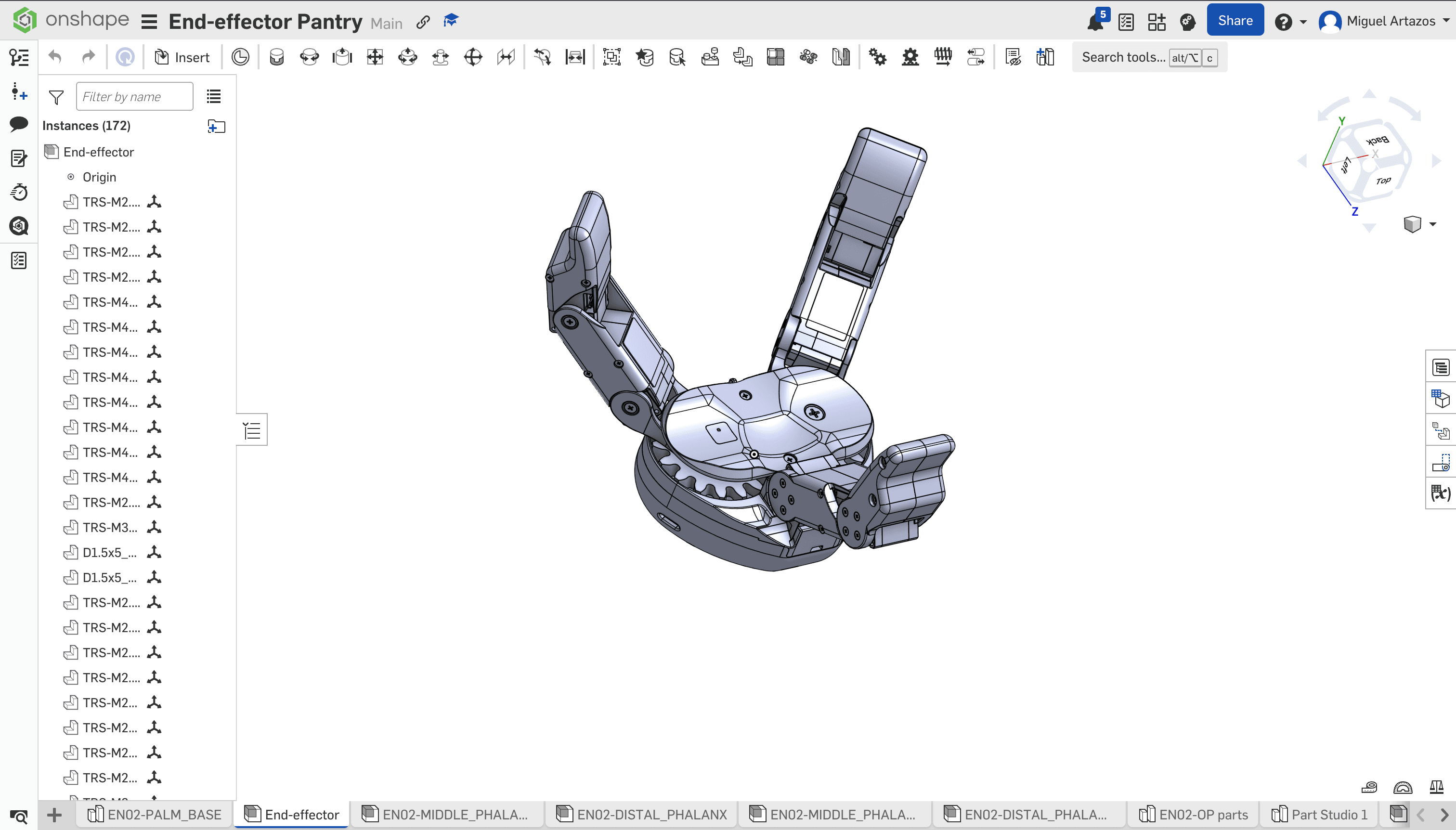
- Started the CAD work with the end effector, using the hand assembly as the first subsystem for shelf-scale manipulation.
- Defined the near-term mechanical questions: grip clearance, compliant contact, palm/backstop support, wrist stiffness, cable routing, and mounting to a larger arm.
- Mapped the next pieces of the robot around local computer vision, edge inference, deterministic motor control, arm packaging, and a compact base.
Engineering decisions
- Use a simple two-finger gripper direction with wide contact surfaces and a palm/backstop instead of starting with an overly complex humanoid hand.
- Design around common pantry objects first: cans, boxes, jars, bags, and spice bottles.
- Plan local edge AI for object recognition and shelf-organization decisions while keeping motor control and safety behavior in deterministic robot-control logic.
- Treat heavy-object placement as a stability and safety constraint, so heavier items are planned for lower shelves rather than high placements.
Current state
- The project currently centers on the end-effector CAD assembly and the pantry-specific constraints around it.
- The next design step is testing grip clearance and object stability, then building the arm and base around this hand geometry.